|
|
@@ -10,12 +10,12 @@ FZ_shape* FZ_new_shape(){
|
|
|
new_shape->position = (FZ_vector_2){0, 0};
|
|
|
new_shape->velocity = (FZ_vector_2){0, 0};
|
|
|
new_shape->angle = 0;
|
|
|
- new_shape->angular_veclocity = 0;
|
|
|
+ new_shape->angular_velocity = 0;
|
|
|
|
|
|
// default otha stuff
|
|
|
new_shape->flags = 0;
|
|
|
new_shape->mass = 1;
|
|
|
- new_shape->moment_of_intertia = 1;
|
|
|
+ new_shape->moment_of_inertia = 1;
|
|
|
new_shape->point_count = 4;
|
|
|
new_shape->points = malloc(sizeof(FZ_vector_2) * 4);
|
|
|
new_shape->transformed_points = malloc(sizeof(FZ_vector_2) * 4);
|
|
|
@@ -36,6 +36,7 @@ FZ_scene* FZ_new_scene(){
|
|
|
new_scene->shape_count = 0;
|
|
|
new_scene->shapes = NULL;
|
|
|
new_scene->gravity = (FZ_vector_2){0, -300};
|
|
|
+ new_scene->restitution = 0.7;
|
|
|
|
|
|
return new_scene;
|
|
|
}
|
|
|
@@ -119,7 +120,7 @@ projected_points_data project_points(FZ_shape* shape_a, FZ_shape* shape_b){
|
|
|
uint16_t point_a = i;
|
|
|
uint16_t point_b = (i + 1) % shape_b->point_count;
|
|
|
|
|
|
- FZ_vector_2 line_normal = v2_normalize(v2_rotate_90(v2_ew_sub(shape_a->transformed_points[point_a], shape_a->transformed_points[point_b])));
|
|
|
+ FZ_vector_2 line_normal = v2_normalize(v2_rotate_90(v2_ew_sub(shape_b->transformed_points[point_a], shape_b->transformed_points[point_b])));
|
|
|
|
|
|
double a_max = -INFINITY;
|
|
|
double a_min = INFINITY;
|
|
|
@@ -170,8 +171,12 @@ projected_points_data project_points(FZ_shape* shape_a, FZ_shape* shape_b){
|
|
|
uint16_t incident_line_index;
|
|
|
double lowest_dot = INFINITY;
|
|
|
|
|
|
- draw_line(vector_2_lerp(data.reference_shape->transformed_points[data.reference_line_index], data.reference_shape->transformed_points[(data.reference_line_index + 1) % data.reference_shape->point_count], 0.5), v2_ew_add(vector_2_lerp(data.reference_shape->transformed_points[data.reference_line_index], data.reference_shape->transformed_points[(data.reference_line_index + 1) % data.reference_shape->point_count], 0.5), v2_mul(smallest_penetrations_normal, 40)), 0x22FFFFFF);
|
|
|
+ double highest_dot = -INFINITY;
|
|
|
+
|
|
|
+ // draw_line(vector_2_lerp(data.reference_shape->transformed_points[data.reference_line_index], data.reference_shape->transformed_points[(data.reference_line_index + 1) % data.reference_shape->point_count], 0.5), v2_ew_add(vector_2_lerp(data.reference_shape->transformed_points[data.reference_line_index], data.reference_shape->transformed_points[(data.reference_line_index + 1) % data.reference_shape->point_count], 0.5), v2_mul(smallest_penetrations_normal, 40)), 0x22FFFFFF);
|
|
|
|
|
|
+ // find the incident line that is most opposite of the reference line normal
|
|
|
+ // also finding the most penetrating point
|
|
|
for (int i = 0; i < data.incident_shape->point_count; i++){
|
|
|
FZ_vector_2 line_start = data.incident_shape->transformed_points[i];
|
|
|
FZ_vector_2 line_end = data.incident_shape->transformed_points[(i + 1) % data.incident_shape->point_count];
|
|
|
@@ -179,7 +184,7 @@ projected_points_data project_points(FZ_shape* shape_a, FZ_shape* shape_b){
|
|
|
// normal of this line
|
|
|
FZ_vector_2 normal = v2_normalize(v2_rotate_90(v2_ew_sub(line_start, line_end)));
|
|
|
|
|
|
- draw_line(vector_2_lerp(line_start, line_end, 0.5), v2_ew_add(vector_2_lerp(line_start, line_end, 0.5), v2_mul(normal, 40)), 0xFF22FFFF);
|
|
|
+ // draw_line(vector_2_lerp(line_start, line_end, 0.5), v2_ew_add(vector_2_lerp(line_start, line_end, 0.5), v2_mul(normal, 40)), 0xFF22FFFF);
|
|
|
|
|
|
// check if this normal and the reference normal are opposite
|
|
|
double dot = v2_dot(normal, smallest_penetrations_normal);
|
|
|
@@ -187,24 +192,44 @@ projected_points_data project_points(FZ_shape* shape_a, FZ_shape* shape_b){
|
|
|
lowest_dot = dot;
|
|
|
incident_line_index = i;
|
|
|
}
|
|
|
+
|
|
|
+ // find most penetrating point
|
|
|
+ dot = v2_dot(v2_ew_sub(line_start, data.reference_shape->position), v2_mul(smallest_penetrations_normal, -1));
|
|
|
+ if (dot > highest_dot){
|
|
|
+ highest_dot = dot;
|
|
|
+
|
|
|
+ data.point_b = line_start;
|
|
|
+ }
|
|
|
}
|
|
|
|
|
|
data.incident_line_index = incident_line_index;
|
|
|
|
|
|
- FZ_vector_2 line_ab_vector = v2_ew_sub((data.incident_line_index - 1) < 0 ? data.incident_shape->transformed_points[data.incident_shape->point_count - 1] : data.incident_shape->transformed_points[data.incident_line_index - 1], data.incident_shape->transformed_points[data.incident_line_index]);
|
|
|
- FZ_vector_2 line_bc_vector = v2_ew_sub(data.incident_shape->transformed_points[data.incident_line_index], data.incident_shape->transformed_points[(data.incident_line_index + 1) % data.incident_shape->point_count]);
|
|
|
+ // find point a
|
|
|
+
|
|
|
+ FZ_vector_2 reference_a = data.reference_shape->transformed_points[(data.reference_line_index) % data.reference_shape->point_count];
|
|
|
+ FZ_vector_2 reference_b = data.reference_shape->transformed_points[(data.reference_line_index + 1) % data.reference_shape->point_count];
|
|
|
|
|
|
- double offset = v2_dot(data.reference_shape->transformed_points[data.reference_line_index], smallest_penetrations_normal);
|
|
|
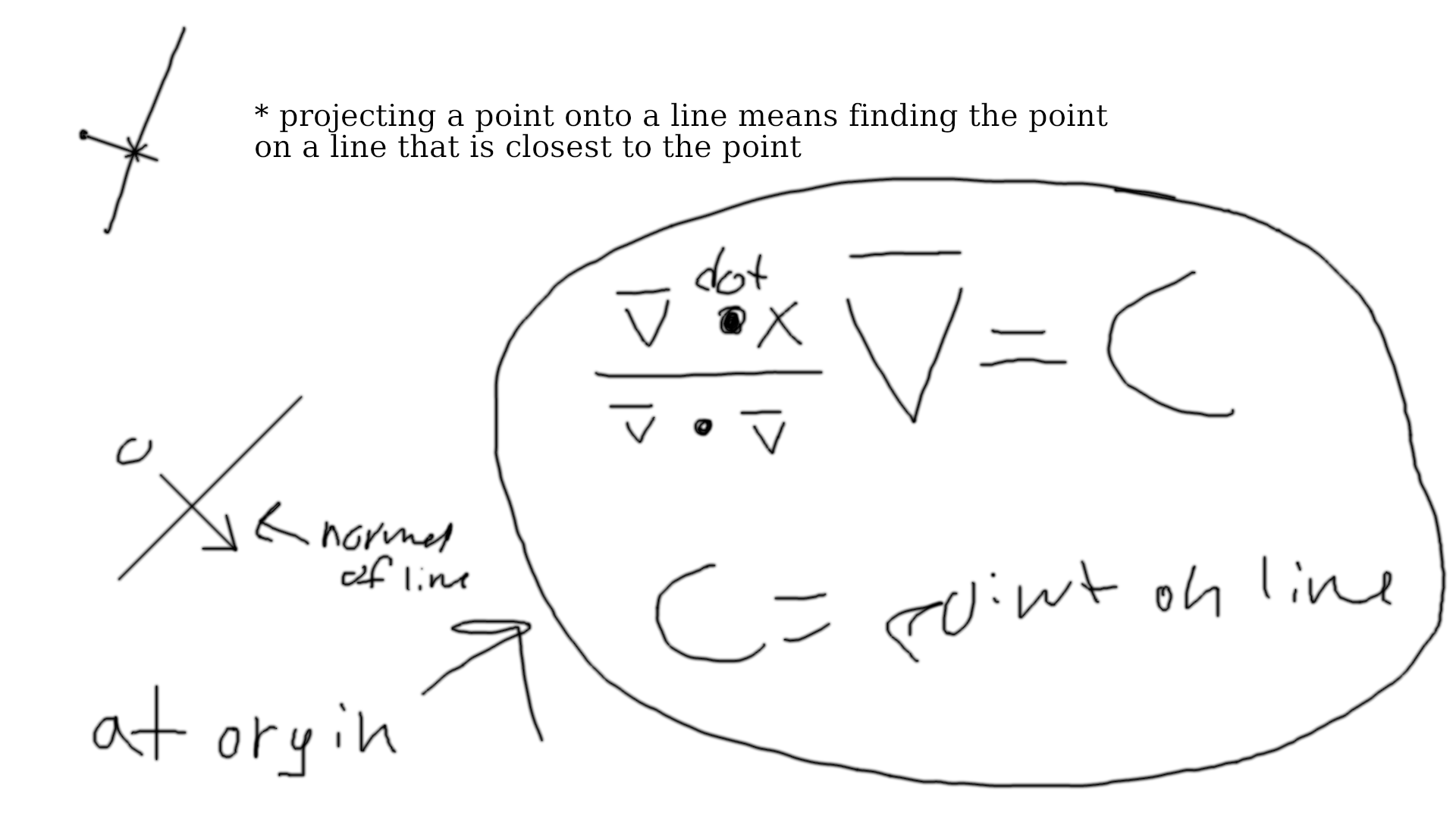
+ FZ_vector_2 reference_vector = v2_ew_sub(reference_b, reference_a);
|
|
|
+ FZ_vector_2 point_to_project = v2_ew_sub(data.point_b, reference_a);
|
|
|
|
|
|
- double dot_ab = v2_dot(line_ab_vector, smallest_penetrations_normal);
|
|
|
- double dot_bc = v2_dot(line_bc_vector, smallest_penetrations_normal);
|
|
|
+ double c = v2_dot(reference_vector, point_to_project) / v2_dot(reference_vector, reference_vector);
|
|
|
|
|
|
+ data.point_a = v2_ew_add(
|
|
|
+ v2_mul(reference_vector, c),
|
|
|
+ reference_a
|
|
|
+ );
|
|
|
|
|
|
+ // debug points
|
|
|
+ // for (int i = 0; i < 8; i++){
|
|
|
+ // draw_line(data.point_a, v2_ew_add(data.point_a, v2_rot((FZ_vector_2){0, 40}, (FZ_vector_2){0, 0}, 6.28318530718 * ((double)i / (double)8.0))), 0xFFFFFFFF);
|
|
|
+ // draw_line(data.point_b, v2_ew_add(data.point_b, v2_rot((FZ_vector_2){0, 40}, (FZ_vector_2){0, 0}, 6.28318530718 * ((double)i / (double)8.0))), 0xFFFFFFFF);
|
|
|
+ // }
|
|
|
|
|
|
return data;
|
|
|
}
|
|
|
|
|
|
int FZ_tick(FZ_scene* scene, double deltatime){
|
|
|
+ // update objects based on velocities
|
|
|
for (int i = 0; i < scene->shape_count; i++){
|
|
|
FZ_shape* shape = scene->shapes[i];
|
|
|
|
|
|
@@ -215,7 +240,7 @@ int FZ_tick(FZ_scene* scene, double deltatime){
|
|
|
shape->velocity = v2_ew_add(shape->velocity, v2_mul(scene->gravity, deltatime));
|
|
|
|
|
|
shape->position = v2_ew_add(shape->position, v2_mul(shape->velocity, deltatime));
|
|
|
- shape->angle += shape->angular_veclocity * deltatime;
|
|
|
+ shape->angle += shape->angular_velocity * deltatime;
|
|
|
}
|
|
|
|
|
|
for (int j = 0; j < shape->point_count; j++){
|
|
|
@@ -228,46 +253,128 @@ int FZ_tick(FZ_scene* scene, double deltatime){
|
|
|
// printf("%f %f\n", shape->transformed_points[0].x, shape->transformed_points[0].y);
|
|
|
}
|
|
|
|
|
|
- for (int i = 0; i < scene->shape_count; i++){
|
|
|
- FZ_shape* shape_1 = scene->shapes[i];
|
|
|
-
|
|
|
- for (int j = 0; j < scene->shape_count; j++){
|
|
|
- if (i <= j) continue;
|
|
|
-
|
|
|
- FZ_shape* shape_2 = scene->shapes[j];
|
|
|
-
|
|
|
- projected_points_data data = project_points(shape_1, shape_2);
|
|
|
+ // check for colisions
|
|
|
+ double iterations = 1;
|
|
|
|
|
|
- if (data.penetration != 0){
|
|
|
- shape_1->flags |= FZ_SHAPE_IS_COLLIDING;
|
|
|
- shape_2->flags |= FZ_SHAPE_IS_COLLIDING;
|
|
|
-
|
|
|
- int i0 = data.reference_line_index;
|
|
|
- int i1 = (i0 + 1) % data.reference_shape->point_count;
|
|
|
-
|
|
|
- FZ_vector_2 p0 = data.reference_shape->transformed_points[i0];
|
|
|
- FZ_vector_2 p1 = data.reference_shape->transformed_points[i1];
|
|
|
-
|
|
|
- FZ_vector_2 start = v2_mul(v2_ew_add(p0, p1), 0.5);
|
|
|
-
|
|
|
- FZ_vector_2 edge = v2_ew_sub(p1, p0);
|
|
|
-
|
|
|
- FZ_vector_2 normal = (FZ_vector_2){ edge.y, -edge.x };
|
|
|
-
|
|
|
- double len2 = v2_dot(normal, normal);
|
|
|
+ for (int k = 0; k < (int)iterations; k++){
|
|
|
+ for (int i = 0; i < scene->shape_count; i++){
|
|
|
+ FZ_shape* shape_1 = scene->shapes[i];
|
|
|
+
|
|
|
+ for (int j = 0; j < scene->shape_count; j++){
|
|
|
+ if (i <= j) continue;
|
|
|
+
|
|
|
+ FZ_shape* shape_2 = scene->shapes[j];
|
|
|
+
|
|
|
+ projected_points_data data = project_points(shape_1, shape_2);
|
|
|
+
|
|
|
+ if (shape_1->flags & FZ_SHAPE_IS_STATIC && shape_2->flags & FZ_SHAPE_IS_STATIC) continue;
|
|
|
+
|
|
|
+ // shapes are colliding
|
|
|
+ if (data.penetration != 0){
|
|
|
+ shape_1->flags |= FZ_SHAPE_IS_COLLIDING;
|
|
|
+ shape_2->flags |= FZ_SHAPE_IS_COLLIDING;
|
|
|
+
|
|
|
+ int i0 = data.reference_line_index;
|
|
|
+ int i1 = (i0 + 1) % data.reference_shape->point_count;
|
|
|
+
|
|
|
+ FZ_vector_2 p0 = data.reference_shape->transformed_points[i0];
|
|
|
+ FZ_vector_2 p1 = data.reference_shape->transformed_points[i1];
|
|
|
+
|
|
|
+ FZ_vector_2 start = v2_mul(v2_ew_add(p0, p1), 0.5);
|
|
|
+
|
|
|
+ FZ_vector_2 edge = v2_ew_sub(p1, p0);
|
|
|
+
|
|
|
+ FZ_vector_2 reference_normal = v2_normalize((FZ_vector_2){ edge.y, -edge.x });
|
|
|
+
|
|
|
+ FZ_vector_2 pc_a = v2_ew_sub(
|
|
|
+ data.point_a,
|
|
|
+ data.reference_shape->position
|
|
|
+ );
|
|
|
+
|
|
|
+ FZ_vector_2 pc_b = v2_ew_sub(
|
|
|
+ data.point_b,
|
|
|
+ data.incident_shape->position
|
|
|
+ );
|
|
|
+
|
|
|
+
|
|
|
+ FZ_vector_2 point_a_velocity = v2_ew_add(
|
|
|
+ data.reference_shape->velocity,
|
|
|
+ v2_scalar_cross(
|
|
|
+ pc_a,
|
|
|
+ data.reference_shape->angular_velocity
|
|
|
+ )
|
|
|
+ );
|
|
|
+
|
|
|
+
|
|
|
+ FZ_vector_2 point_b_velocity = v2_ew_add(
|
|
|
+ data.incident_shape->velocity,
|
|
|
+ v2_scalar_cross(
|
|
|
+ pc_b,
|
|
|
+ data.incident_shape->angular_velocity
|
|
|
+ )
|
|
|
+ );
|
|
|
+
|
|
|
+ double normal_velocity_scalar = v2_dot(v2_ew_sub(
|
|
|
+ point_a_velocity,
|
|
|
+ point_b_velocity
|
|
|
+ ),
|
|
|
+ reference_normal
|
|
|
+ );
|
|
|
+
|
|
|
+ double J_numerator = -(1 + scene->restitution) * normal_velocity_scalar;
|
|
|
+
|
|
|
+ data.reference_shape->moment_of_inertia = data.reference_shape->mass * (pow(data.reference_shape->scale.x, 2) + pow(data.reference_shape->scale.y, 2)) / 12.0;
|
|
|
+ data.incident_shape->moment_of_inertia = data.incident_shape->mass * (pow(data.incident_shape->scale.x, 2) + pow(data.incident_shape->scale.y, 2)) / 12.0;
|
|
|
+
|
|
|
+ double m̃_a = data.reference_shape->flags & FZ_SHAPE_IS_STATIC ? 0.0 : 1.0 / data.reference_shape->mass + squared_distance_2(data.reference_shape->position, data.point_a) / data.reference_shape->moment_of_inertia;
|
|
|
+ double m̃_b = data.incident_shape->flags & FZ_SHAPE_IS_STATIC ? 0.0 : 1.0 / data.incident_shape->mass + squared_distance_2(data.incident_shape->position, data.point_b) / data.incident_shape->moment_of_inertia;
|
|
|
+ double J_denominator = m̃_a + m̃_b;
|
|
|
+
|
|
|
+ double J = J_numerator / J_denominator;
|
|
|
|
|
|
- if (len2 > 0.0) {
|
|
|
- normal = v2_mul(normal, 1.0 / sqrt(len2));
|
|
|
+ FZ_vector_2 delta_a_v = v2_mul(reference_normal, J / data.reference_shape->mass);
|
|
|
+ FZ_vector_2 delta_b_v = v2_mul(reference_normal, -J / data.incident_shape->mass);
|
|
|
+
|
|
|
+ double delta_a_w = (J * v2_v2_cross(pc_a, reference_normal)) / data.reference_shape->moment_of_inertia;
|
|
|
+ double delta_b_w = (-J * v2_v2_cross(pc_b, reference_normal)) / data.incident_shape->moment_of_inertia;
|
|
|
|
|
|
- FZ_vector_2 end =
|
|
|
- v2_ew_add(start,
|
|
|
- v2_mul(normal, data.penetration));
|
|
|
+ double separation = data.penetration / (double)(!(data.reference_shape->flags & FZ_SHAPE_IS_STATIC) + !(data.incident_shape->flags & FZ_SHAPE_IS_STATIC));
|
|
|
|
|
|
- draw_line(start, end, 0xFF5555FF);
|
|
|
+ if(!(data.reference_shape->flags & FZ_SHAPE_IS_STATIC)){
|
|
|
+ data.reference_shape->velocity = v2_ew_add(
|
|
|
+ data.reference_shape->velocity,
|
|
|
+ delta_a_v
|
|
|
+ );
|
|
|
|
|
|
- draw_line(data.incident_shape->transformed_points[data.incident_line_index], data.incident_shape->transformed_points[(data.incident_line_index + 1) % data.incident_shape->point_count], 0xFFFFFFFF);
|
|
|
+ data.reference_shape->angular_velocity += delta_a_w;
|
|
|
+
|
|
|
+ data.reference_shape->position = v2_ew_add(
|
|
|
+ data.reference_shape->position,
|
|
|
+ v2_mul(
|
|
|
+ reference_normal,
|
|
|
+ separation
|
|
|
+ )
|
|
|
+ );
|
|
|
+ }
|
|
|
+
|
|
|
+ if(!(data.incident_shape->flags & FZ_SHAPE_IS_STATIC)){
|
|
|
+ data.incident_shape->velocity = v2_ew_add(
|
|
|
+ data.incident_shape->velocity,
|
|
|
+ delta_b_v
|
|
|
+ );
|
|
|
+
|
|
|
+ data.incident_shape->angular_velocity += delta_b_w;
|
|
|
+
|
|
|
+ data.incident_shape->position = v2_ew_add(
|
|
|
+ data.incident_shape->position,
|
|
|
+ v2_mul(
|
|
|
+ reference_normal,
|
|
|
+ -separation
|
|
|
+ )
|
|
|
+ );
|
|
|
+ }
|
|
|
+ } else {
|
|
|
}
|
|
|
- } else {
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
@@ -281,7 +388,7 @@ int FZ_render_debug(FZ_scene* scene){
|
|
|
FZ_shape* shape = scene->shapes[i];
|
|
|
|
|
|
for (int j = 0; j < shape->point_count; j++){
|
|
|
- // draw_line(shape->transformed_points[j], j < shape->point_count - 1 ? shape->transformed_points[j + 1] : shape->transformed_points[0], shape->flags & FZ_SHAPE_IS_COLLIDING ? 0x5555FFFF : 0x55FF55FF);
|
|
|
+ draw_line(shape->transformed_points[j], j < shape->point_count - 1 ? shape->transformed_points[j + 1] : shape->transformed_points[0], shape->flags & FZ_SHAPE_IS_COLLIDING ? 0x5555FFFF : 0x55FF55FF);
|
|
|
}
|
|
|
|
|
|
for (int j = 0; j < shape->point_count; j++){
|
|
|
@@ -342,8 +449,8 @@ int FZ_init(){
|
|
|
|
|
|
context.flags = 0;
|
|
|
|
|
|
- context.sdl.width = 500;
|
|
|
- context.sdl.height = 500;
|
|
|
+ context.sdl.width = 2000;
|
|
|
+ context.sdl.height = 1000;
|
|
|
|
|
|
context.sdl.half_width = context.sdl.width / 2;
|
|
|
context.sdl.half_height = context.sdl.height / 2;
|

 Iver
Iver
{kind=link}